TurboElectric Battery Integration and Management System
Introduction
In the fall of 2020 I was recommended by a friend to do my Senior Design Project with Oklahoma State's Aerospace department on a hybrid turboelectric aircraft. My initial understanding of the project barely extended beyond my appreciation of the cool sounding words within the title, but my knowledge of many related fields would vastly expand by the end of even my first 3 months with the turboelectric group.
The specific purpose of the project was to create and integrate a battery system for a hybrid unmanned aircraft. I wasn't aware of this at the time, but we would end up accomplishing all of the demands of the project and even publish a paper over the throttle control mechanism that spawned from my design.
Battery System
My team and I inherited an aircraft with a turbine engine making around 7kW of power, coupled to a three phase electric generator, then a rectifier, an inverter, and finally to the electric motor that drove the primary propeller. Two mechanical engineers were tasked with adding mounts on either side of the primary propeller for the purpose of mounting additional propellers. Howard, my fellow electrical engineer on the project, and I were to create the aforementioned battery system. The goal of both tasks was to decrease the distance needed for the plane to takeoff. Hence our team name: STOL (short takeoff and landing).
It seemed to Howard and I that most of the complicated work had been done for us after our initial project briefing, but two crucial pieces of information had yet to be mentioned to us. Firstly, the existing system ran at a nominal voltage of 48V. Secondly, our system had to weigh no more than 8 pounds. These factors, when combined with the fact that our battery needed to be able to supplement 5kW to the system, heavily restricted our design capabilities. Put concisely, our system would need to be light and capable of high current -- a combination of conflicting requirements.
The design constraints and difficulties associated with them were not what made this project difficult; complications related to our team management were.
Put simply and without issuing blame, more than half of our allotted time for the project was wasted entertaining impractical ideas related to DC/DC converters.
Hypothetically, a DC/DC converter would allow for greater control of the entire system, as the battery could be both charged and discharged at a regulated voltage in accordance with system parameters such as throttle, battery state of charge, etc.
Practically, such a converter was infeasible, as it would weigh multiple times more than our entire weight allotment.
I spent time developing an alternative solution that relied upon changing the existing throttle controller and creating an IGBT based BMS (battery management system). My system had advantages including reduced cost, weight, size, and physical complexity.
I included a few slides outlining my ideas in our final design presentation, and I received a call from the project champion the following evening giving us permission to disregard our previous constraints and pursue my alternative design.
We had approximately a month from that moment to completely change the direction of the project and create a flight worthy system.
One month, many broken parts, and a few sleepless nights later our design was functioning in the lab.
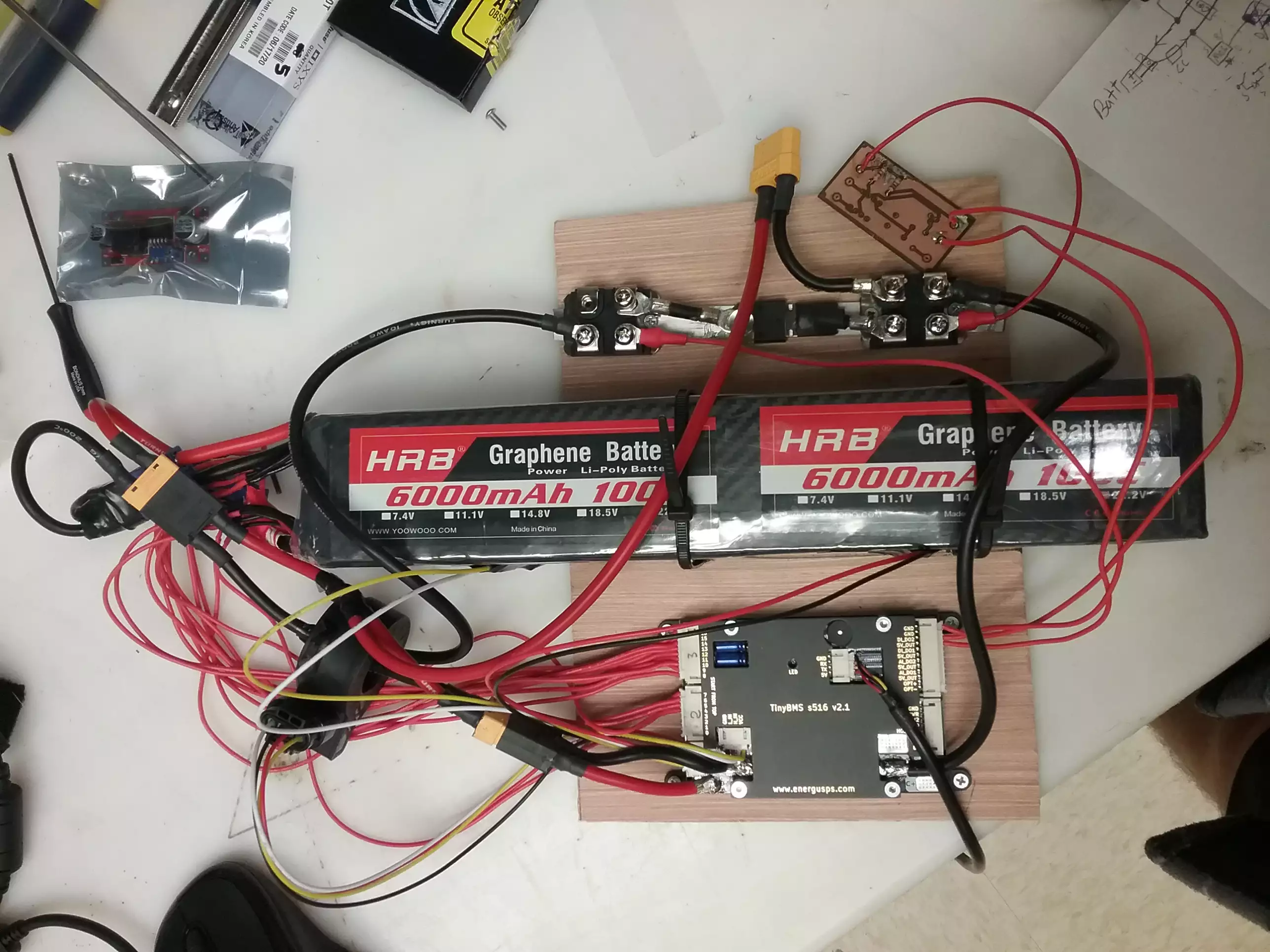
Here is what the first working iteration of the design looked like without the throttle controller:
The system consisted of a BMS, hall effect sensor, two IGBTs, one for charge and the other for discharge; a little logic and buck converter board I made for driving the IGBTs, and a graphene battery capable of discharging a paltry 100C while being able to charge at a rate of 5C. It was neither pretty nor professionally laid out in its first rendition, but it was at least functional.
First Flight
Active Throttle Control
Following our team's success and my graduation in the fall of 2020, I continued to work on the project while looking for employment. I worked on fine tuning the overall system and integrating what we referred to as "Active Throttle Control." The first flights of the hybrid aircraft were flown with a traditional control method: the turbine engine was directly controlled rather than a particular speed or thrust amount being demanded. This approach is not optimal, as the battery is subject to less than ideal operating conditions while both charging and discharging. The premise behind Active Throttle Control is to modulate the commanded speed of the aircraft while the engine automatically reacts. The battery can supplement the turbine engine while it reacts to changes in throttle: the battery can provide a large amount of current and propulsion while the engine speeds up, and it can absorb excess energy that would otherwise be waste when the engine is slowing down. Here is a video example of our BMS software monitoring the current flowing into and out of the battery:
There is a great deal of potential with this control mechanism. For example, when the aircraft is cruising, the thrust can be held constant while the battery charge point can be used as the throttle set point of the engine. Such a configuration would allow for the battery to be charged and ready for another high-speed takeoff immediately after landing and refueling.
My tenure with the TurboElectric group ended in the summer of 2021, but not after we published a paper over Active Throttle Control and our experiences with it.
The team and I had the opportunity to present our work to Governor Stitt during one of his visits to Oklahoma State University. I'll upload pictures or footage of this event once I'm able to obtain them.